Today we pushed our preprint to the Ar\(\chi\)iv, so we can show off our great new “Queue-Based Invasion Percolation” algorithm (QBIP) while we wait for the peer review process to run its course.
To appreciate this new algorithm requires some backstory: In 2022 we published a paper in Water Resources Research describing a modified version of the classic Morphological Image Opening approach that included the effect of gravity on the fluid. Around the same time we published a paper in Computers and the Geosciences where we used image-based tools to simulate the volume controlled invasion of a non-wetting fluid. This algorithm differed from the the traditional Image Morphology approaches because it followed a volume-controlled rather than a pressure controlled invasion. The allowed it to simulate entire invasion path rather than just providing the stable fluid configuration at discrete pressures. The animation below illustrates the output of the volume-controlled approach:
Now getting to the exciting part of this announcement: we have now combined the above to algorithms to provide an volume-controlled invasion with the effect of gravity. The result is something like this:
In the above animation you can see that the invading fluid is being impacted by gravity, resulting in a flatter invasion front. Instead of invading a large throat at a high elevation in the image, the fluid prefers to invade a smaller opening near the bottom because it does not have to overcome the effect of gravity.
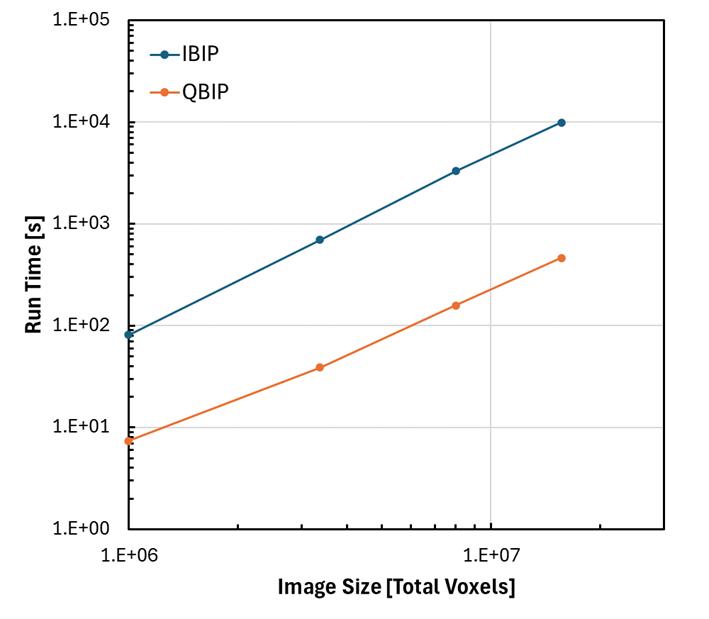
Another very nice feature of the QBIP algorithm is that it is at leat 10X faster than the original IBIP. We were able to achieve this by using a priorty queue to keep track of which voxel to invade next rather than searching for it on each step. So not only does the new QBIP algorithm yield fluid invasion paths under the influence of gravity (or not), but it can also do this in a much more reasonable time.
This work was a collaboration between the PMEAL group at the University of Waterloo, and the group of Robin Zhao at McMaster University. Robin and his team provided the experimental micromodel data which was used to validate the model. It was great to work with them and given how close they are, I’m sure we’ll be doing more collaboration soon.
Anyway, we hope you find this new algorithm useful.